 PoBot
PoBot
 PoBot 2006 en images
PoBot 2006 en imagesVue de face
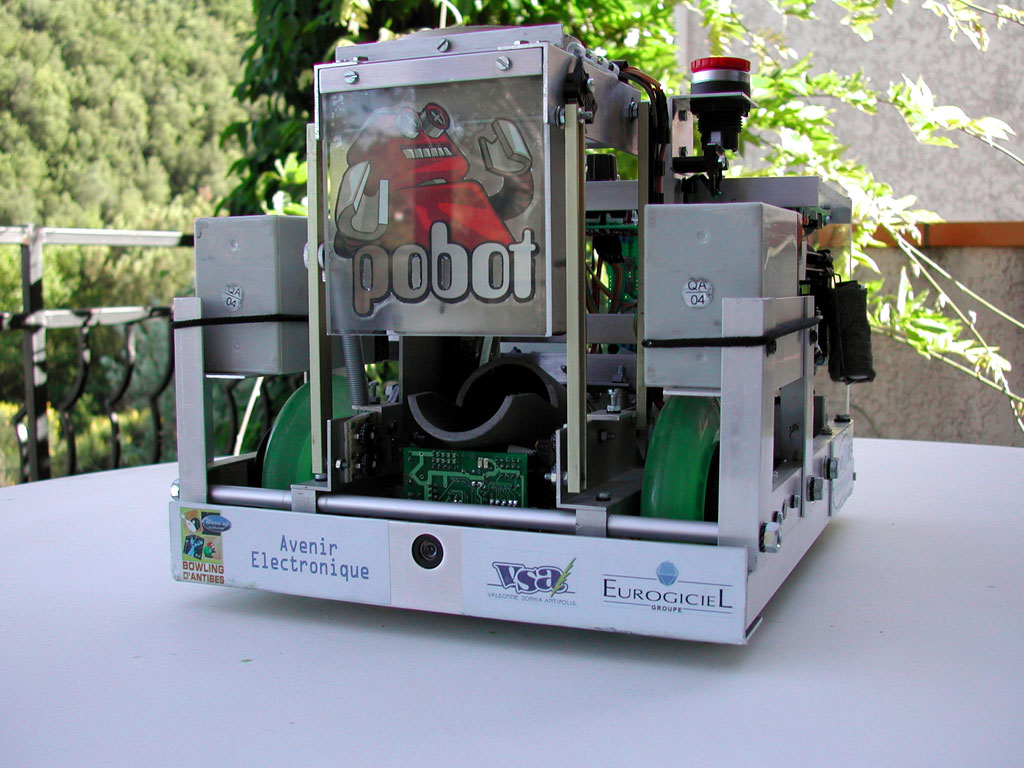
Cette vue permet de distinguer les éléments suivants :
– les roues motrices, placées en position avant
– le système d’aspiration en position rentrée, derrière le logo frontal
– l’entrée du tube de stockage des balles collectées
– la CMUcam, au centre du pare-choc
– les batteries de puissance (propulsion et turbine), situées au desus des roues, afin d’avancer le centre de gravité le plus possible et de placer un maximum de charge sur celles-ci
A noter sur ce dernier point que la position intiale des batteries de puissance se situait vers l’arrière, dans le compartiment des cartes électroniques. Lors des premiers tours de roues en configuration complète (le lundi de la semaine de la Coupe), la motricité en virage s’est avérée catastrophique. Séance de mécanique express en début d’après-midi pour fabriquer deux nouveaux supports et leur fixation au-dessus des roues. De ce fait, il y a maintenant deux sacoches à bagages libres dans le compartiment électronique 😉
Vue de gauche
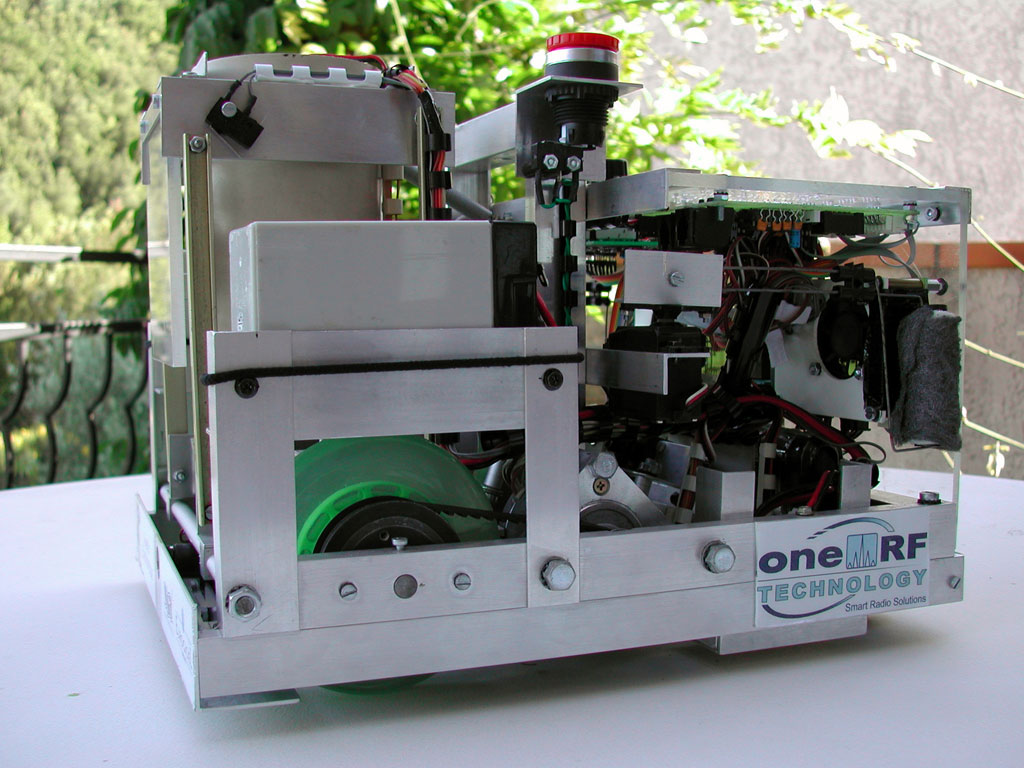
On distingue le moteur pas à pas et la courroie de transmission, ainsi que le rouleau recouvert de laine d’acier au bout du bras rétractable du déclencheur de totem.
L’arrêt d’urgence nous sert également d’interrupteur général.
Vue arrière
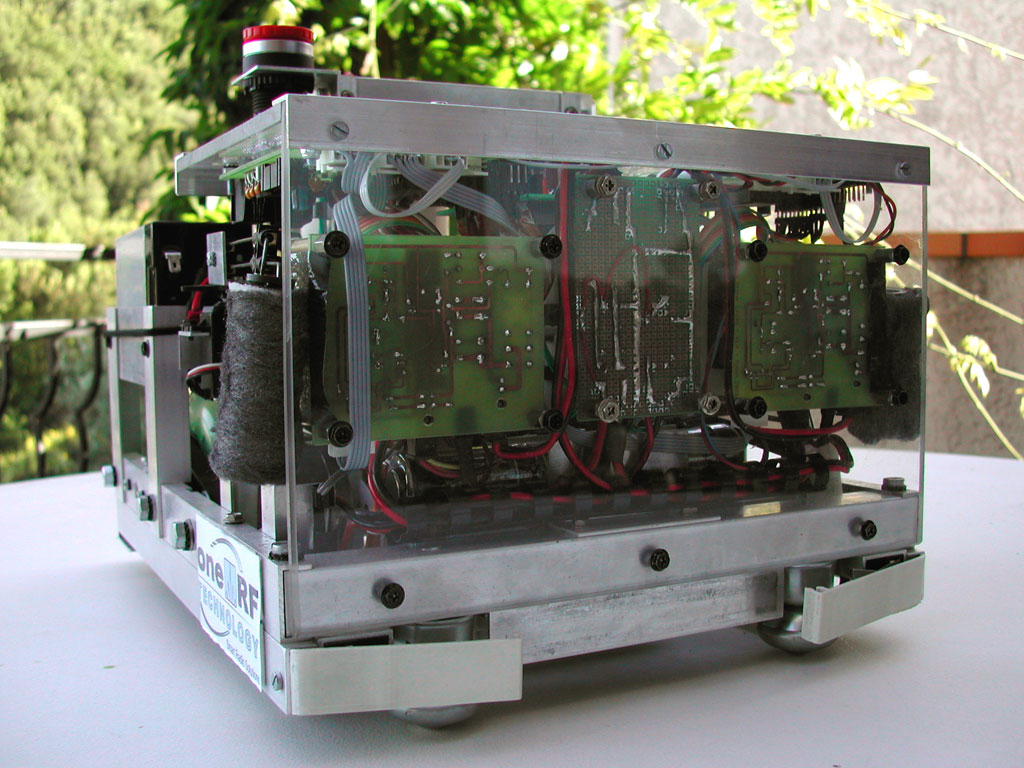
L’ensemble des cartes électroniques est regroupé à l’arrière du robot. Au travers du plexi, on distingue les deux cartes drivers de moteur pas à pas, à base de L6208, qui encadrent la carte de commutation et de distribution des alimentations électriques.
Cette carte reçoit les arrivées en provenance des 3 batteries (2 Pb de 6V et une NiCd de 7,2V), et commute les 3 tensions ainsi disponibles (6V, 7,2V et 12V) au moyen de relais, commandés par l’arrêt d’urgence. Chaque tension est équipée d’un fusible de protection, situé sur cette carte également.
Vue de droite
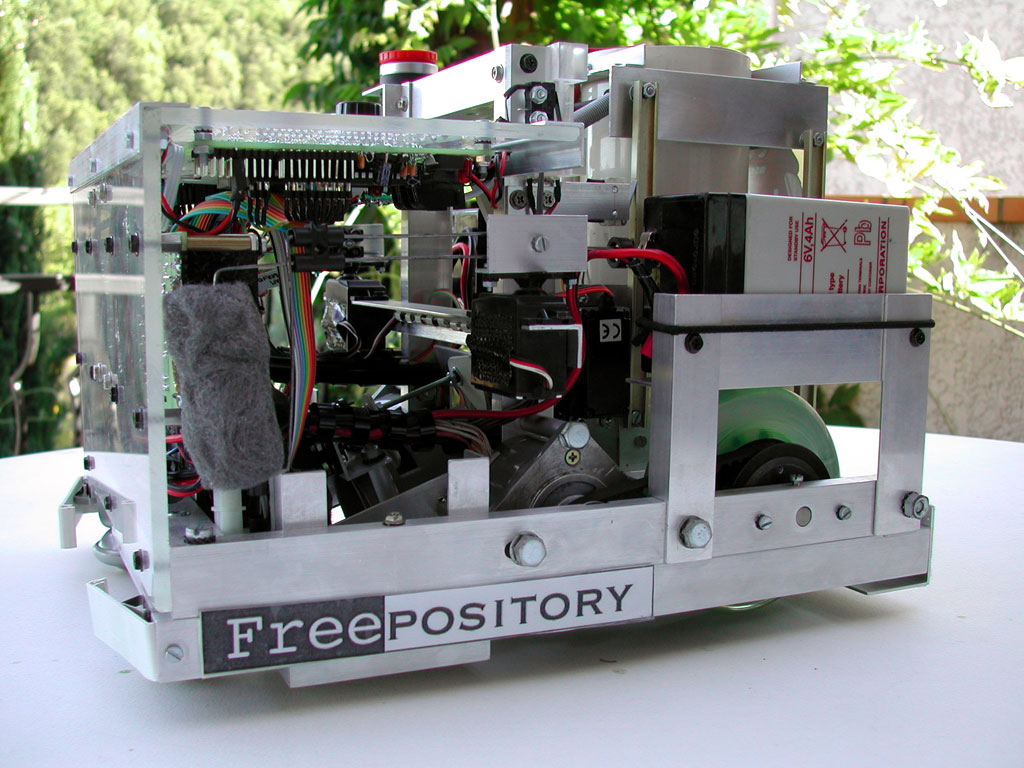
En gros, la même chose qu’à gauche, à quelques détails près.
Vue de dessus
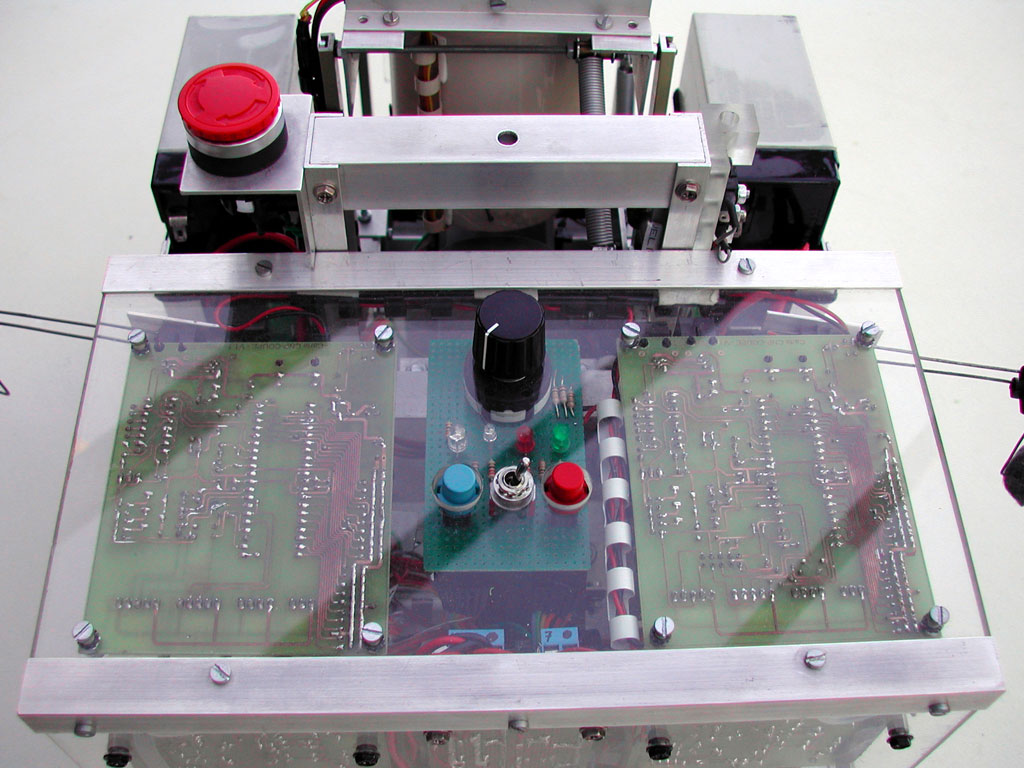
Outre l’arrêt d’urgence, à gauche de l’arceau support du mât de balise (et servant aussi de poignée de transport), et le jack de départ en plexi, à droite du même arceau, on peut voir les autres cartes électroniques :
– à gauche, la carte CPU master, chargée de la supervision du robot et de la gestion des capteurs et actionneurs
– au centre le panneau de contrôle, avec le sélecteur rotatif de stratégie, le sélecteur de couleur, les poussoirs d’acquitement et les LEDs de signalisation
– à droite, la carte CPU slave, en charge de la CMUcam et de la gestion du panneau de commande
Vue de dessous

De gauche à droite, on peut voir :
– les 2 détecteurs de couleur, alignés sur l’axe des roues. Ils sont utilisés pour l’alignement sur l’axe des trous, par exploitation de la bordure du disque de couleur
– le tube de stockage des balles
– les 2 moteurs pas à pas, derrière les roues
– les deux détecteurs I/R avec leur LED et le potentiomètre de réglage de leur portée, sur la plaquette à pastilles transversale. Ces détecteurs servent à l’approche finale du trou, au moment de la dépose
– la barrière I/R permettant de détecter que la balle est tombée dans le trou
– le variateur pour le contrôle du régime de la turbine d’aspiration.
– les deux ball-casters





