 PoBot
PoBot
 Les détails
Les détailsEn vrac ici quelques détails sympas (enfin, que nous trouvons sympas).
Le jack de départ
L’an dernier, nous avons eu quelques problèmes (en fait, 2 matches forfaits) à cause du jack de départ (un jack audio standard) qui génèrait des parasites avec les vibrations de la table lors de la mise en place des éléments de jeu par les arbitres.
Cette année, exit le jack. A la place un montage électro-mécanique (sur le même principe que ce que j’avais bricolé l’an dernier pour le robot LEGO de l’équipe du CIV) : un capteur mécanique latéral actionné par une bête goupille. On en voit les détails ci-dessous :
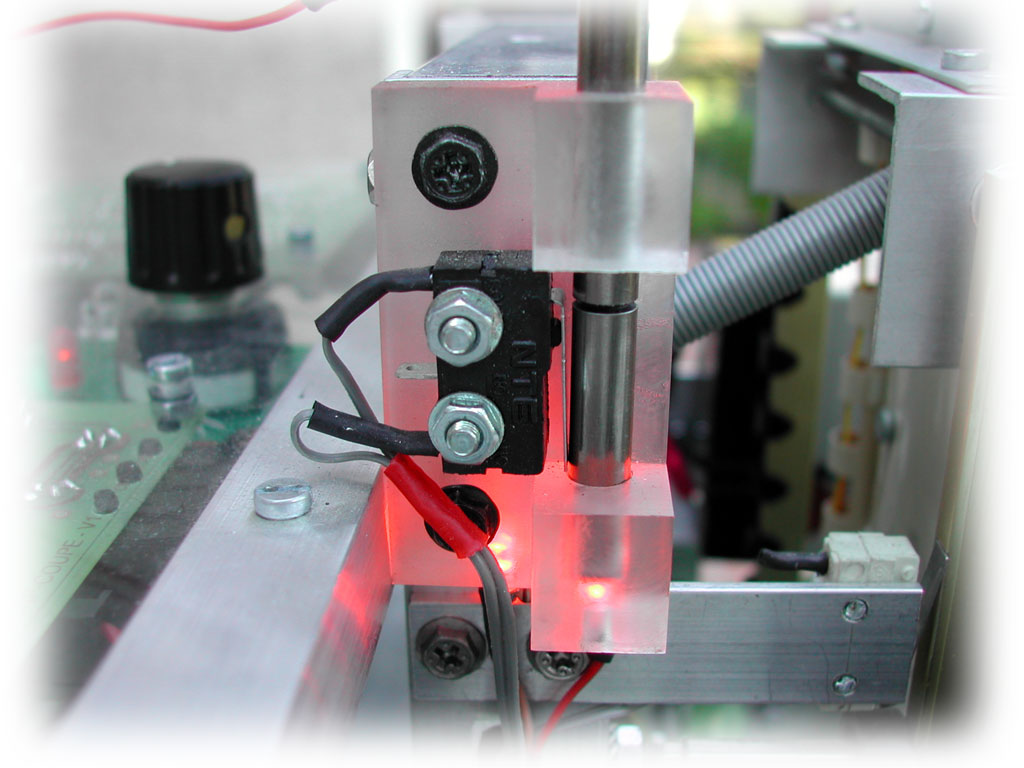
– le capteur est un fin de course
– la goupille est un morceau de guide de tête d’impression récupéré sur une défunte imprimante à jet d’encre (ce genre de guide fournit des axes de 6mm ou de 8mm d’une parfaite rectitude, et qui ne s’oxydent pas)
– le corps du bidule est fraisé (à la main) dans la masse, dans un morceau de plexi également récupéré dans un rebut de laboratoire
Pour le fun, au lieu de faire bêtement clignoter une LED sur un panneau de contrôle pour demander à l’opérateur "mets-moi le jack de départ", puis ensuite lui signaler que le fameux jack a bien été détecté, c’est l’embase qui est éclairée dans la masse par 2 LEDs haut rendement enchâssées. C’est joli, et ça fait un peu tuning sur les bords. Et non, ça ne gêne pas l’adversaire, car le tout s’éteint dès que la goupille est retirée... pour se remettre à clignoter au bout des 90 secondes réglementaires.
L’essieu principal
Afin de garantir un parfait parallélisme des roues, elles ont été montées sur un même axe, constitué par l’axe (8mm) des galets d’entraînement du papier prélevé sur la même imprimante.

Cet axe servait également au montage des 2 détecteurs de couleur, au moyen d’une entretoise sur mesure confectionnée dans un carré d’alu de 12mm.
Les chemins de câblage
Le robot ayant été voulu ouvert et transparent, il n’était pas question de laisser visible un câblage style plat de spaghetti (comme on en a vu quelques exemplaires d’ailleurs...)
Une solution est d’utiliser des petits colliers rilsan, mais cela présente un inconvénient gênant : du fait de Murphy, c’est toujours quand on vient de placer le dernier collier sur un faisceau qu’il s’avère nécessaire d’ajouter ou de déplacer un fil. Que celui à qui ça n’est jamais arrivé me jette la première pince coupante. Non seulement c’est agaçant, mais ça fait perdre du temps et en plus ça finit par coûter cher en collier. Et on finit pas ne pas les remplacer...
La solution retenue est d’utiliser des reliures pour documents, de type "boudin".
Plusieurs avantages à ces fournitures :
– pas chères (surtout si vous avez un service reprographie à portée...)
– disponibles en plusieurs diamètres, et donc capacité en fils
– suffisamment rigide pour constituer des chemins de câble droits
– possibilité d’ajouter et de retirer des fils à tout moment
– possibilité de faire entrer ou sortir des fils du faisceau en tout point de la longueur
– facile et rapide à fixer, avec du simple adhésif double-face (celui en mousse pour miroirs)
Par conséquent, ça ne se discute pas 😉
On en voit un exemple d’utilisation multiple ci-dessous :





