 PoBot
PoBot
 Le barillet à balles de squash
Le barillet à balles de squashHenri a conçu un barillet pour distribuer les balles de squash une par une au lanceur de notre robot "Sniper" de la Coupe 2005.
Principe
Le robot doit lancer des balles de squash de l’autre côté des ponts, soit 2 mètres, et avoir assez de force pour faire tomber des quilles en bois et en acier.
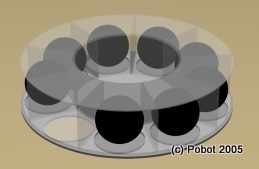
L’idée du barillet est de limiter les manipulations des balles, et de minimiser l’encombrement. Les 8 balles sont assez grosses, et les disposer en ligne (comme dans un distributeur de gobelets) aurait occupé toute la hauteur. Si on avait mis deux balles de front pour diviser la hauteur par deux, il y aurait pu avoir des frottements et le mécanisme se coincer.
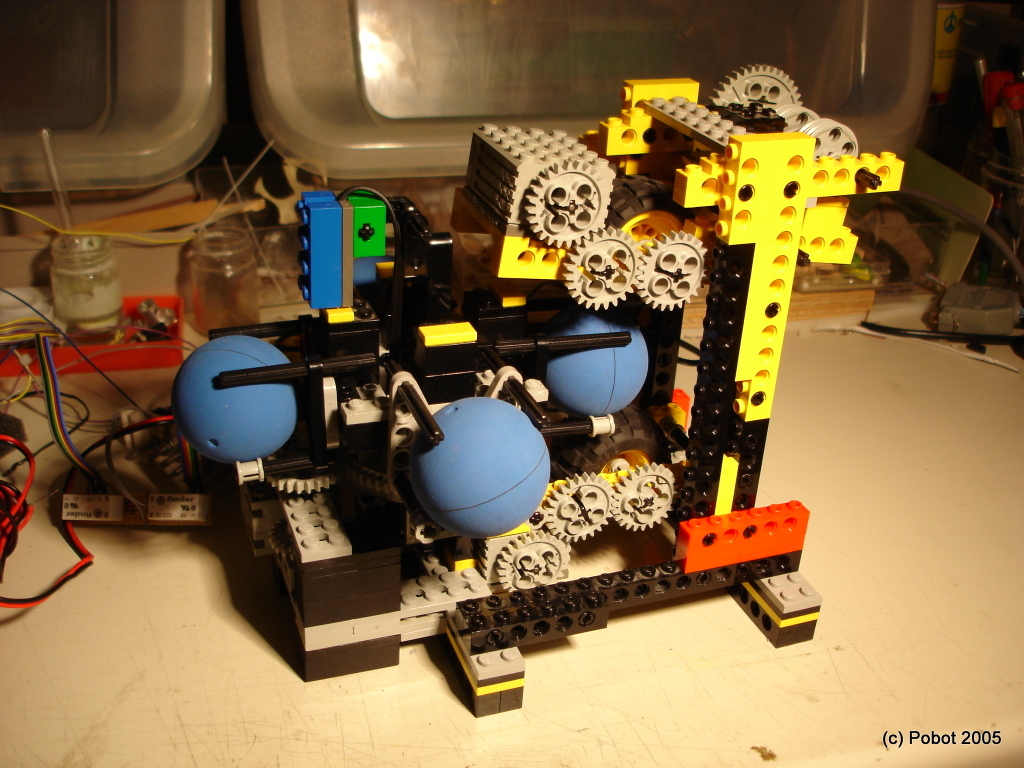
Finalement, isoler chaque balle et l’amener jusqu’au lanceur semblait la meilleure solution. C’est d’ailleurs ce qu’Eric avait fait avec le prototype en Lego.
Réalisation
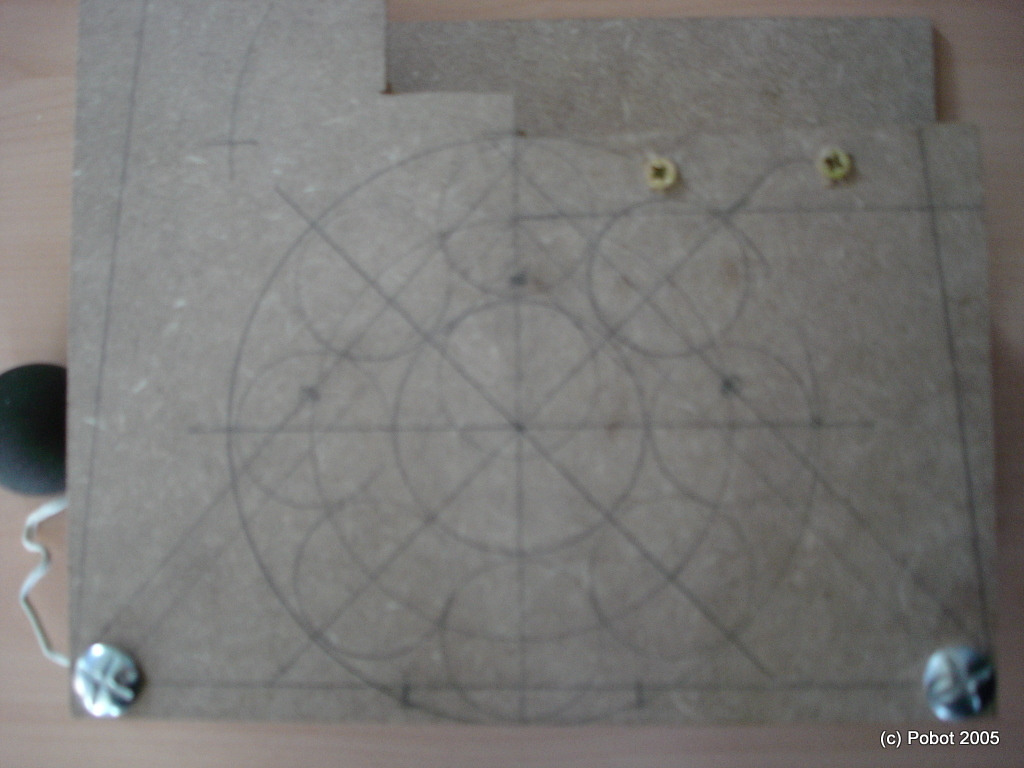
Une première ébauche a été réalisée avec une plaque en alu et un disque en plexiglas :

Cela permettait d’avoir une meilleure vision du volume et de discuter ensemble des détails en ayant sous les yeux. Le tracé aux dimensions définitives a pu être tracé directement sur le lanceur pour définir l’emplacement du trou permettant de faire passer une balle jusqu’au lanceur.
Le centre du barillet a été occupé par le moteur, l’électronique et les engrenages qui font tourner les balles une à une. Un capteur à effet hall permet de détecter la position.

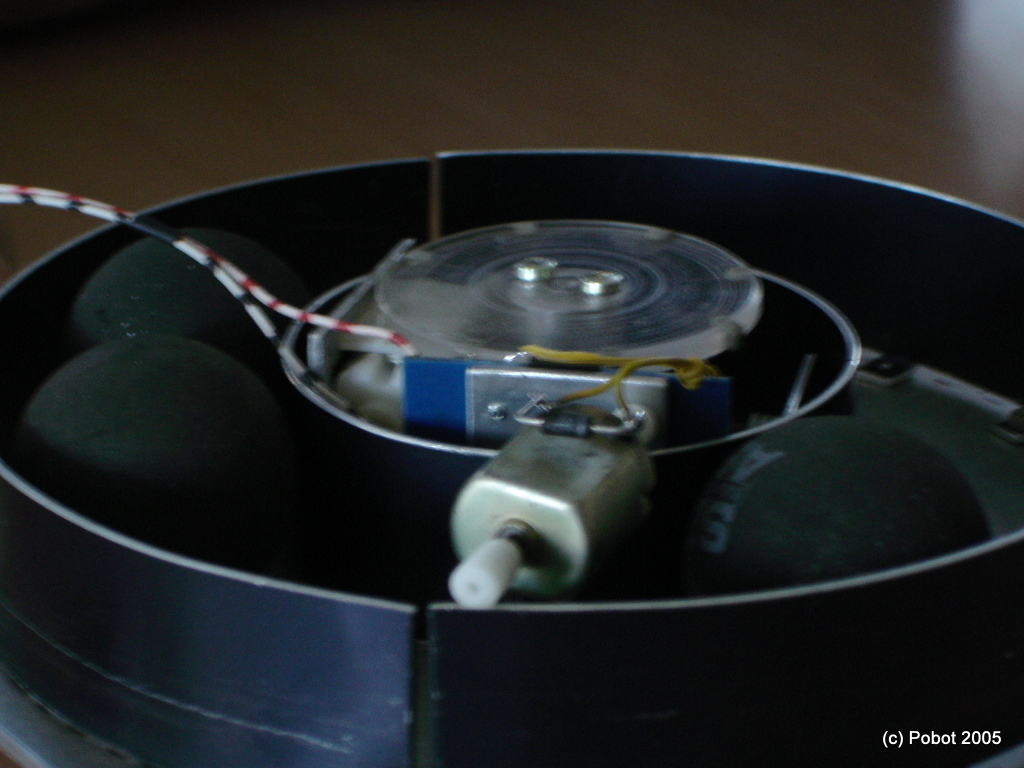
Un travail tout particulier a été mené sur les intercalaires qui séparent les balles pour éviter tout frottement et donc tout blocage.

Résultat
Au final, le barillet est compact, fiable, et beau ce qui ne gâche rien !

Il s’est inséré parfaitement dans l’ensemble du robot, et son remplissage était simple.





