 PoBot
PoBot
 C’est faisable
C’est faisableCette année, j’ai décidé de jouer aussi. Rassurez-vous, je ne participerai pas à la compétition, mais je voulais tester le niveau de difficulté plus précisément, et je me suis donc mis en conditions de match.
Ca veut dire quoi ? Et bien pour commencer, une des tables est déjà construite (d’habitude, je m’en occupais la semaine précédent la compétition).
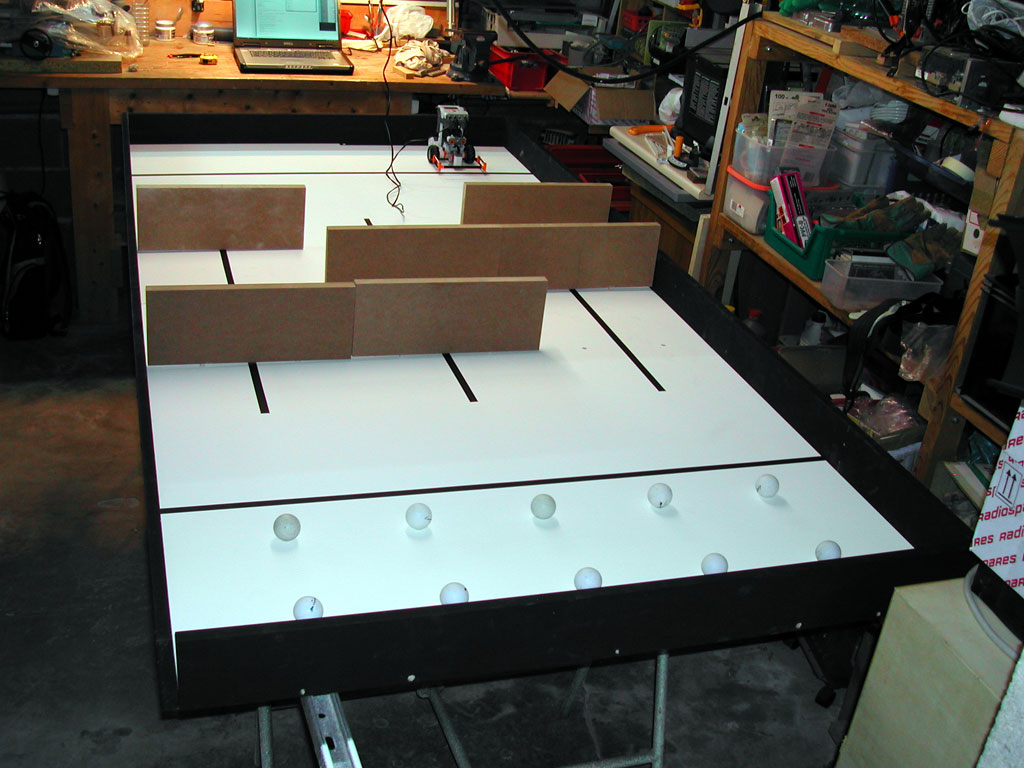
Il manque encore la peinture sur les murs pour faire plus joli, et la grosse croix rouge pour indiquer l’unité de soins. On fera cela au moment voulu.
Et pour continuer, j’ai fait un robot NXT moi aussi 😉


Résultat des courses
C’est faisable.
Les premiers résultats donnent 3 victimes ramenées en 92 secondes, ce qui fait marquer 10 points. Il y a moyen de faire mieux, et peut-être même de faire deux trajets, en optimisant les déplacements.
En fait, il ne faut pas oublier que le NXT est beaucoup plus puissant que le RCX, notamment grâce à ses moteurs qu’on peut contrôler de manière beaucoup plus fiable que ses prédécesseurs.
Et alors ?
Vous allez me dire : ouais, mais qu’est-ce que ça peut nous faire ?
Et bien en fait je vais vous faire profiter de ces résultats, sous la forme de quelques petits conseils.
1/ ne faites pas un robot compliqué : ça ne sert à rien. Je suis parti du modèle avec les deux pinces, que j’ai juste un peu modifié :
– capteur de son enlevé (au passage, je ne vois pas trop l’utilité de ce capteur, et j’aurais préféré avoir un deuxième capteur de lumière ou de contact à la place)
– remplacement des pinces par un système plus adapté
– déplacement du capteur de contact à l’arrière
Il vaut mieux passer peu de temps à construire un robot simple, car ça en laisse plus pour corriger ses défauts, et surtout pour le programmer.
2/ faites un petit robot. Le passage entre les murs n’est pas très large (30 cm moins l’épaisseur de la planche), et il ne faut pas oublier que lorsque qu’un robot de forme rectangulaire tourne sur lui-même, c’est la diagonale qui doit passer. On peut aussi toujours grappiller quelques centimètres en "cassant" les coins
3/ servez-vous des bordures de la table et des murs pour vous recaler fréquemment. Même si les moteurs du NXT permettent de bien mieux contrôler les déplacements, le robot a quand même tendance à dévier au fur et à mesure. Non pas qu’il n’avance pas droit, mais que la précision des 1/4 de tours n’est pas garantie à 100%. Donc dès que vous le pouvez, ré-alignez le robot en vous appuyant sur un élément de la table. C’est la raison du capteur de contact que j’ai placé à l’arrière
4/ utilisez les lignes au sol. Elle sont extrêmement pratiques pour passer à coup sûr le mur
Qu’est-ce que j’ai rajouté d’autre ? Juste une procédure de calibration en début de match pour le détecteur de ligne. Comme je ne voulais pas stocker les valeurs correspondant au noir et au blanc "en dur", le programme commence par demander à l’opérateur de placer le robot au-dessus de chacune des couleurs et les mémorise. Ensuite, il place le robot contre le mur du fond et attend qu’on appuie sur la touche orange pour commencer le match. Il faut reconnaitre que l’écran de la brique et le fait de pouvoir lire les boutons sont très pratiques pour ce genre de dialogue avec l’utilisateur.
Avec quoi j’ai programmé le robot ? J’avoue ne pas avoir utilisé l’environnement graphique fourni en standard parce que j’ai l’habitude des langages de programmation et que je vais plus vite en tapant des instructions qu’en cliquant sur des graphismes. J’ai donc travaillé avec un environnement qui s’appelle RobotC, qui est très bien fait et est très complet. Il n’est pas gratuit, mais ne coûte que $30 et les vaut largement. C’est juste une question de préférences. Pour plus de détails, le mieux est d’aller visiter le site Web dédié.
Voilà. A très bientôt donc pour la visite de mi-parcours (vers les vacances de février comme l’an dernier).




