 PoBot
PoBot
 Temps de charge d’une self-inductance
Temps de charge d’une self-inductanceNous nous intéressons ici à l’une des caractéristiques physiques du moteur pas à pas : le temps de charge de ses bobines.
Intérêt
Pour faire fonctionner au mieux nos moteurs pas à pas, il est important de comprendre le fonctionnement physique des éléments du moteur, et en premier lieu des bobines qui composent
Concrêtement, c’est le couple du moteur qui nous intéresse : plus le couple est grand, plus on peut faire déplacer rapidement un robot en conservant une certaine précision.
Or le couple dépend directement de la force (attirance) appliquée à l’intérieur du moteur par la bobine (stator) sur l’axe (rotor) pour faire passer le pas.
Rappel : dans le moteur pas à pas, les phases sont alimentées successivement, donc les bobines ne sont chargées que pendant une durée courte (de l’ordre de 1 à 15 millisecondes selon la vitesse sur le robot Gobeur 2006).
Le temps de charge est donc très important, car la puissance fournie par la bobine ne sera pas disponible pendant toute la durée, d’où une perte d’efficacité pour un temps de charge trop long.
Cas limite : ce temps de charge détermine la plus grande accélération possible (= temps entre deux successions de phases), donc la vitesse limite, quel que soit le couple du moteur (ie. couple de blocage à vitesse nulle).
Possibilités d’intervention
La première possibilité est de choisir son moteur en fonction de la vitesse souhaitée et du poids du robot (+ la nature du sol, la répartition des masses sur le robot, et en tenant compte des démultiplications entre le moteur et la roue).
Ensuite, pour améliorer les performances d’un moteur, on peut augmenter l’intensité qui passe dans les bobines : la courbe de charge de l’inductance va alors être relevée.
Enfin, dans certains cas, il est possible de diminuer ce temps en "raccourcissant" le bobinage : c’est possible sur certains moteurs bipolaires à 8 fils. Il y a bien que deux phases et 4 signaux de commande, mais on peut combiner ces fils pour réunir deux bobines de chaque phase en parallèle ou en série.
– en série, le bobinage est long et le temps de charge grand.
– en parallèle, le bobinage est deux fois plus court, et le temps de charge quatre fois plus petit !
Exemple
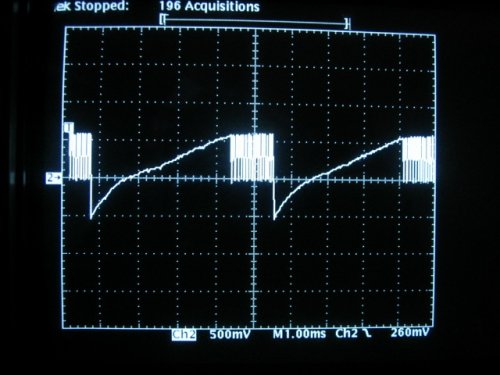
Sur le Gobeur (robot de la Coupe 2006), nous avions récupéré des moteurs dont le temps de charge était très long (3,5 ms) et où les bobines étaient reliées en série.
Nous avons fait la modification avec Henri, qui a pu enregistrer les mesures faites à l’oscilloscope : la différence est saisissante.
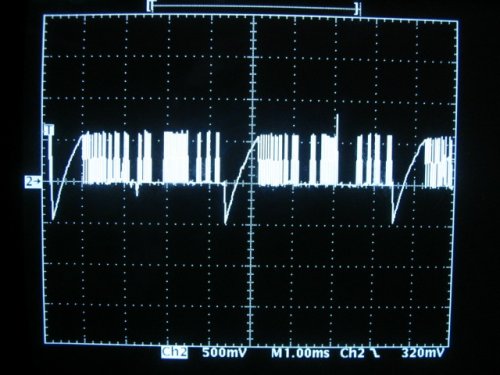
Au final, nous avons un temps de charge d’ 1 milliseconde, ce qui permet d’espérer une vitesse maximale de 30 cm/s contre 15 cm/s précédement.





Vos commentaires
# Le 8 octobre 2006 à 15:04, par Julien H. En réponse à : Acquisition du signal
En réponse à : Acquisition du signal
Note : ces acquisitions d’oscilloscope correspondent à la tension, pas à l’intensité. Il est donc normal d’observer un hachage pendant la seconde partie de la courbe correspondant à la protection en intensité : la tension s’annule pendant ces périodes. Cependant, l’intensité reste à son maximum autorisé grâce aux diodes de roue libre.
Différentes configurations du composant utilisé (L6208) existent pour les diodes de roue libre, ce point sera exploré ultérieurement.
Répondre à ce message