 PoBot
PoBot
 Modélisation du terrain Eurobot 2011
Modélisation du terrain Eurobot 2011Il existe différentes façons de représenter le terrain de la compétition : nous avions déjà utilisé Pov-ray pour générer des images photo-réalistes permettant le calibrage de nos algorithmes de vision.
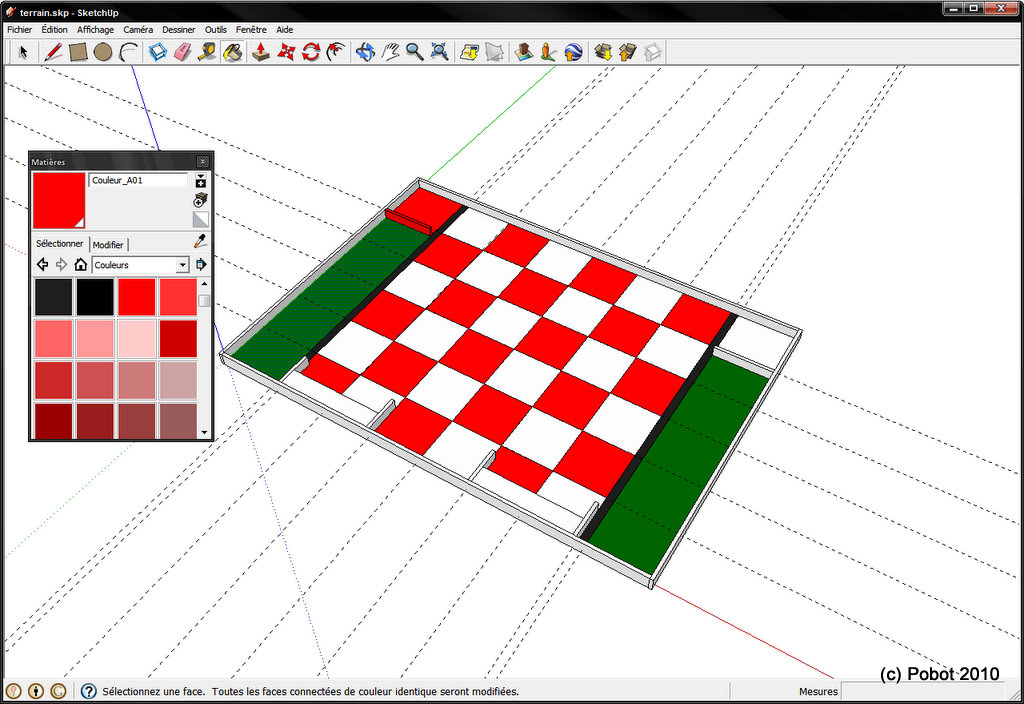
Cette fois, c’est Google Sketchup qui nous rend ce service, en permettant une rapide modélisation (30 minutes à peine) de tout le terrain. On a alors une vision de tous les angles, et la possibilité d’établir une première stratégie.
Différentes utilisations sont possibles : intégration dans un simulateur, représentation des volumes pour évaluer l’encombrement de son robot et les différentes positions qu’il pourra prendre sur le terrain.

Voici le fichier (corrigé car le zip corrompait le fichier) :

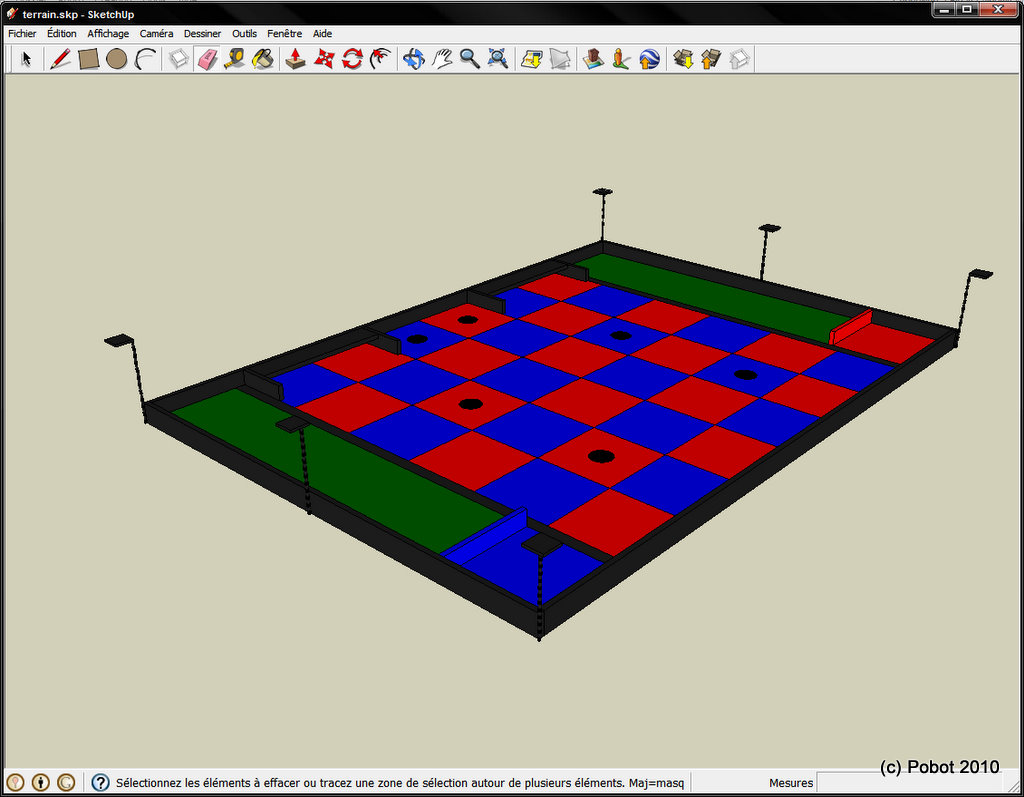
Le modèle est partagé dans le 3D Warehouse, en voici une vue :





Vos commentaires
# Le 7 janvier 2011 à 14:27, par thib En réponse à : Modélisation du terrain Eurobot 2011
En réponse à : Modélisation du terrain Eurobot 2011
bonjour ,
tres bonne initiative mais le fichier ne semble pas se charger en entier sous sketchup 8...
# Le 7 janvier 2011 à 23:33, par Julien H. En réponse à : Modélisation du terrain Eurobot 2011
En réponse à : Modélisation du terrain Eurobot 2011
Bonsoir. Que veux-tu dire ? J’ai vérifié et avec ma version 8.0.3117 sous Windows je n’ai aucune erreur.
# Le 7 janvier 2011 à 23:43, par Julien H. En réponse à : Modélisation du terrain Eurobot 2011
En réponse à : Modélisation du terrain Eurobot 2011
Ok... je crois avoir compris : il y avait une corruption du fichier quand je passais par le zip. Il a fallu que j’uploade le fichier par FTP.
C’est corrigé (même si Firefox me redonne toujours l’ancien zip).
En tout cas merci de l’avoir fait remarquer. Tu es le premier... en espérant qu’il n’ait manqué à personne !
Répondre à ce message