 PoBot
PoBot
Etudiant à l’EIGSI, école d’ingénieurs généraliste, j’ai choisi pour projet de première année l’élaboration d’un montage ludique permettant de montrer simplement le fonctionnement d’un asservissement. Je reprends dans cet article toutes les étapes qui m’ont permis d’y arriver.
Accueil > Mots-clés > Electronique > quadrature
quadrature
Deux signaux électroniques sont en quadrature quand leurs oscillations (sinusoïdale ou créneaux) ont une différence de phase d’1/4 : le second signal commence son cycle quand le premier est à son plus haut.
Ce décalage est également dit "de 90 degrés" ou "de Pi/2" puisque cet angle correspond à 1/4 du cercle trigonométrique. Mais ce décalage peut être obtenu en écartant deux capteurs à la moitié de leur dimension.
Concrètement, ce mode de transmission d’information est utilisé sur les encodeurs de moteurs ou les codeurs incrémentaux utilisés pour mesurer un déplacement d’un robot. Il permet de déterminer le sens de rotation, l’enchaînement "phase A puis phase B" ou "phase B puis phase A" étant donné par la comparaison des fronts montants.
Les signaux en quadrature ne donnent pas directement un angle : il faut mémoriser le nombre d’incréments et en déduire l’angle en fonction de la précision du codeur (360 degrés divisé par le nombre d’incréments par tour de roue).
Ce nombre d’incréments peut varier pour une même roue codeuse selon le mode d’acquisition des signaux, du simple au double selon qu’on traite les fronts montants ou descendants ou les deux.
Articles
-
 Asservissement d’un moteur à courant continu
Asservissement d’un moteur à courant continu
8 octobre 2014, par Benoit T. -
 Roues codeuses
Roues codeuses
15 septembre 2009, par KeurondeComment réaliser des roues codeuse pour un moindre coût.
-
 Odométrie du Pobot Easy
Odométrie du Pobot Easy
28 février 2009, par Julien H.Un capteur de lumière permet de détecter une alternance noir/blanc sur une roue et d’en déduire son avancée (position, vitesse).
-
 Réalisation d’un codeur incrémental à partir d’un moteur pas à pas.
Réalisation d’un codeur incrémental à partir d’un moteur pas à pas.
17 octobre 2005, par PatrickLes codeurs incrémentaux sont largement utilisés en robotique pour réaliser des asservissements en vitesse et/ou en position. Mais ils sont relativement couteux, surtout quand une bonne résolution est nécessaire. Une solution à peu de frais consiste à utiliser un moteur pas à pas de récupération.
Principe
Ces moteurs ont typiquement deux bobinages qui produisent des pulses en quadrature de phase quand l’axe du moteur est mis en rotation. Les signaux peuvent ainsi être mis en forme pour (…) -
 Découverte de l’odométrie
Découverte de l’odométrie
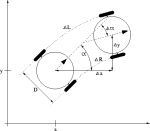
23 juillet 2007, par Julien H.Pour commencer nos travaux sur l’odométrie, voici quelques résultats issus des premières recherches sur le Net, des souvenirs d’école et des datasheets des constructeurs.
Vocabulaire
Pas facile de s’y retrouver, alors une liste de tout ce qu’on trouve comme appellations. roue codeuse/coding wheel : désigne les roues qui vont servir à discrétiser la rotation en nombre de pas. C’est ce terme qu’il faut chercher (sur le catalogue Farnell par exemple, dans la rubrique "Contrôle de process, (…)
