 PoBot
PoBot
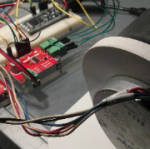
Nous allons utiliser des drivers dSPIN avec la puce L6470 de ST Microelectronics. Ils ont été présentés par Éric dans cet article.
Plutôt gros le moteur, non ? C’est un Step-Syn 03-820-26 de SANYO qui fait 85 mm de diamètre.
Cet article décrit comment adapter les paramètres électriques aux caractéristiques des moteurs, et ensuite à régler les paramètres d’accélération et de vitesse à la structure mécanique de R2-D2, notamment les effets de son poids et de son centre de gravité.
La (…)
Accueil > Mots-clés > Electronique > courant
courant
Le courant électrique est un flux d’électrons. A tension égale, des composants électroniques utilisent chacun une portion du courant : il est donc important de bien dimensionner le courant disponible à tout instant. Il faut additionner toutes les consommations à pleine charge.
La mesure du courant électrique s’effectue avec un ampèremètre, sa dimension est l’intensité et l’unité est l’ampère, noté A avec ses dérivés usuels comme mA ou µA.
Une led consomme un courant de 20 mA tandis qu’un moteur de robot consomme au-delà d’1 A.
Articles
-
 Benchmark du dSpin pour R2-D2
Benchmark du dSpin pour R2-D2
19 août 2012, par Julien H. -
 Évitement d’obstacles et de chutes de R2-D2
Évitement d’obstacles et de chutes de R2-D2
10 août 2012, par Julien H.Lors de la conception du robot droïde, la priorité a été mise sur la sécurité. Il s’agit d’un robot mobile autonome de plus d’un mètre de haut, pesant plus qu’un enfant de même taille. Il est donc primordial qu’il puisse s’arrêter de lui même en cas de problème : collision, perte d’équilibre, voire chute.
La solution ne peut pas simplement être un bouton d’arrêt d’urgence : nous n’aurons pas forcément accès au robot. Cela ne peut pas non plus être une télécommande : la personne qui la (…) -
 Electroaimant avec un pont en H
Electroaimant avec un pont en H
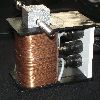
20 mars 2013, par Julien H.Une bobine peut servir d’électroaimant lorsqu’on l’alimente. Dans le cadre d’un TIPE, nous avons aidé deux étudiants de classes préparatoires aux grandes écoles du CIV à Valbonne et des Eucalyptus à Nice.
Afin de simplifier le contrôle du courant et la polarisation magnétique de la bobine, nous leur avons conseillé d’utiliser un pont en H, en l’occurrence le L298 inclus sur la carte Roméo de DFRobot (compatible Arduino).
En quelques minutes, en reprenant l’un des nombreux codes existant (…) -
 Drikybot : contrôle des moteurs (2013)
Drikybot : contrôle des moteurs (2013)
22 mai 2013, par Audrick F.Contrôle de moteur du DrikyBot
-
 Mosfet pour moteur à courant continu
Mosfet pour moteur à courant continu
12 mai 2013, par Julien H.Les composants de puissance existent dans différentes familles, et les mosfets sont parmi les plus simples à utiliser pour couper un courant de grande intensité (plusieurs dizaines d’ampères).
Le contrôle de moteur peut parfois nécessiter une grande quantité de courant mais se satisfaire d’un simple contrôle de vitesse sans précision, sans asservissement en position. C’est le cas par exemple pour des hélices, ou pour des moteurs de propulsion puissants dont l’asservissement sera externe (…)
