 PoBot
PoBot
Tandis que l’équipe Coupe concourrait samedi 7 mai pour la Coupe Méditerranée 2011 de robotique, nous étions quelques-uns à tenir un stand dans les locaux de l’ISEN Toulon, l’école d’ingénieur qui organisait l’événement régional.
Nous avons reçu la visite d’un reporter de Var Matin, le quotidien régional qui a publié ce dimanche une photo du Robonova-I que le club n’a pas conçu (il s’agit d’un produit commercial) mais que nous utilisons pour des démos et que nous prévoyons de modifier lors (…)
Accueil > Mots-clés > Partenaires > Eurobot
Eurobot
Eurobot est une compétition internationale organisée par l’association du même nom, et en France par Planète Sciences qui a créé la Coupe E=m6 puis la Coupe de France qui a ensuite été reprise dans une douzaine de pays à travers le monde.
Articles
-
 Démos robotiques à Toulon (Var Matin)
Démos robotiques à Toulon (Var Matin)
15 mai 2011, par Julien H. -
 Construction du terrain 2011
Construction du terrain 2011
21 avril 2011, par Julien H., StephanLe terrain des Coupes Eurobot a des dimensions stables chaque année : 3 mètres x 2,10 mètres, avec des bordures de 7 centimètres. Seuls les couleurs et les accessoires varient, parfois simplement, parfois avec des dénivelés (2007) et des trous (2006).
Nous avons utilisé trois planches d’1mètre sur 2 mètres 10, dans de l’aggloméré de 18 mm d’épaisseur (ce qui est déjà bien assez lourd à transporter par rapport à du 22 mm.
La bordure est faite d’aggloméré de 18 mm, à l’exception des (…) -
 Le modèle 3D
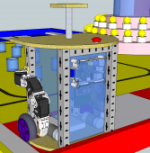
Le modèle 3D
27 mars 2013, par Eric P.Modèle 3D du terrain et du robot, permettant la mise au point des mouvements des bras
-
 Présentation de la Coupe Eurobot
Présentation de la Coupe Eurobot
23 décembre 2005, par Julien H.La compétition voit s’affronter 200 équipes sur un règlement modifié chaque année. L’épreuve consiste en 5 matchs de qualification, équipe contre équipe. Les 16 meilleurs s’affrontent ensuite lors des finales.
Quelques vidéos
Voici notre match de la Coupe de France 2005 :
Coupe de France de Robotique 2005 envoyé par JulienPobot. - Vidéos des dernières découvertes technologiques.
Voici un reportage de 2007 sur la Coupe :
Coupe de La Robotique - Qu’est ce que c’est ? envoyé par (…)
