 PoBot
PoBot
Cet article présente une solution de contrôle de relais 220V telle qu’elle a été conçue par une personne maîtrisant la conception de cartes et la fabrication de circuits électroniques fiables.
Nous ne publions pas les schémas car la manipulation de l’alimentation secteur 220V est dangereuse pour un amateur. L’association ne saurait être tenue responsable des accidents liés à la reproduction d’un tel circuit.
Utiliser une Arduino pour contrôler des appareils électriques 220 volts, c’est (…)
Accueil > Mots-clés > Kits et cartes de développement > Arduino
Arduino
L’Arduino est un concept à la fois matériel (une carte d’entrées/sorties avec un micro-contrôleur programmable) et logiciel (du C++ simplifié mais totalement compatible et une interface utilisateur ultra-simple).
On peut l’utiliser surtout pour du prototype rapide, mais de plus en plus comme solution définitive grâce à différentes formats, du plus pratique au plus compact.
Nous lui consacrons un grand nombre d’articles, à la fois de découverte et de prise en main pour les débutants, mais aussi des exemples d’utilisation dans des robots, des installations domotiques, des œuvres artistiques.
Articles
-
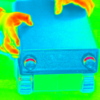
 Boitier pour Arduino avec relais 220 volts
Boitier pour Arduino avec relais 220 volts
28 août 2011, par Stephan -
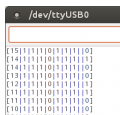
 Interruptions externes
Interruptions externes
23 novembre 2009, par Julien H.Nous allons voir dans cet article l’exploitation d’entrées numériques particulières d’un micro-contrôleur, appelées "interruptions externes".
Cet article va utiliser l’Arduino donc c’est une utilisation simplifiée. Un autre article de ce site est dédié aux microcontrôleurs par une approche plus bas-niveau : Trucs et astuces.
Définition
Il s’agit d’une connexion particulière dans le micro-contrôleur qui va interrompre l’exécution de votre code principal lorsqu’un changement est détecté (…) -
 Transformer un capteur tout ou rien
Transformer un capteur tout ou rien
6 septembre 2008, par Julien H.Cet article présente un cas concret d’utilisation d’un capteur de présence (on/off) pour intégrer dans le temps ses valeurs et ainsi obtenir une valeur numérique plus intéressante.
Notre problématique est simple : on dispose d’un capteur de présence ou de proximité (PROXIR infrarouge dont on a déjà parlé ici) qui nous donne une indication très fugitive "je vois" / "je vois pas" et on voudrait en tirer un peu plus.
La solution est simple : on va mesurer le temps pendant lequel le capteur (…) -
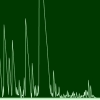
 Traitement du son par FFT (fast fourier transformer)
Traitement du son par FFT (fast fourier transformer)
20 mai 2013, par Audrick F.retour d’expérience de la FFT pour le robot DrikyBot
-
 Soucoupe contrôlée à distance
Soucoupe contrôlée à distance
26 septembre 2012, par Julien H.Notre plate-forme flottante est opérationnelle depuis plusieurs mois, et les tests de flottaison sont concluants.
Les circuits ne sont pas encore fixés dans la sculpture unique qui couvrira l’ensemble, d’où l’allure globale du montage :
Avant de procéder à l’asservissement automatique, voici un programme permettant de la contrôler à distance, de recevoir les valeurs internes de différentes variables et surtout... de ramener la soucoupe à bon port quand elle se retrouvera en plein milieu (…) -
 Pilotage du Pobot Easy
Pilotage du Pobot Easy
2 mars 2009, par Julien H.On va pouvoir piloter le robot à distance avec les modules XBee. Une bonne occasion de faire un peu de télémétrie pour recevoir les différents événements qui se produisent à bord.
L’idée est d’installer sur ordinateur tout un tas de petites applets de visualisation : consignes de vitesse, vitesses des servomoteurs, positionnement par odométrie, vision par capteurs Sharp, etc...
Premier essai
On aura pour commencer : la production des consignes de vitesse, grâce à notre panneau de (…) -
 Adapter les niveaux électriques
Adapter les niveaux électriques
7 juillet 2012, par Julien H.Si vous avez réussi à fournir une alimentation à chacune des cartes de votre robot, bravo ! Mais peut-être certaines cartes doivent-elles communiquer ensemble ? Et là, il faut faire attention à ne pas provoquer d’incident avec un risque de griller les composants les plus sensibles.
Le problème
Le cas le plus fréquent est la connexion d’un capteur fonctionnant en 5 volts sur une carte programmable fonctionnant en 3.3 volts. Nous ne referons pas l’histoire mais vous pouvez consulter cet (…) -
 Arduino pilotée par Processing sur Raspberry Pi
Arduino pilotée par Processing sur Raspberry Pi
9 juillet 2012, par Julien H.Après avoir réussi à faire tourner quelques programmes sur la RPi, il était tant de l’utiliser pour contrôler un robot. C’est chose faite avec la première liaison Raspberry Pi / Arduino, utilisant Processing (Java) et Firmata (C++).
-
 Le Tankobot (2012)
Le Tankobot (2012)
19 mai 2012, par Julien H.Ce robot permet de faire des tests rapides d’algorithmes. Il a été conçu pour être très pratique et pouvoir servir à de nombreux ateliers. Il est donc robuste et simple.
Basé sur un châssis RP-5 offert par Zartronic, le Tankobot est un robot d’études mis au point grâce aux participants des ateliers hebdomadaires de l’association Pobot.
En 2013, il a été équipé d’une tourelle à 3 capteurs ultrasons. Mécanique
Les deux chenilles du robot sont mises en mouvement par deux moteurs à (…) -
 Les starter kits pour Arduino
Les starter kits pour Arduino
13 décembre 2009, par Julien H.Un "starter kit" permet de démarrer un projet avec tous les éléments nécessaires afin de ne pas perdre de temps et d’éviter la frustration de manquer d’un composant à 20 centimes pour terminer votre montage. Mais quand on débute, il est difficile d’évaluer ses besoins.
Avec plus de sept années d’utilisation de micro-contrôleurs en amateurs, nous vous apportons notre expérience dans le choix d’un kit pour bien débuter, tout en économisant l’achat de composants en grand nombre.
Si vous (…)
