 PoBot
PoBot
Nous allons voir dans cet article l’exploitation d’entrées numériques particulières d’un micro-contrôleur, appelées "interruptions externes".
Cet article va utiliser l’Arduino donc c’est une utilisation simplifiée. Un autre article de ce site est dédié aux microcontrôleurs par une approche plus bas-niveau : Trucs et astuces.
Définition
Il s’agit d’une connexion particulière dans le micro-contrôleur qui va interrompre l’exécution de votre code principal lorsqu’un changement est détecté (…)
Accueil > Mots-clés > Kits et cartes de développement > Arduino
Arduino
L’Arduino est un concept à la fois matériel (une carte d’entrées/sorties avec un micro-contrôleur programmable) et logiciel (du C++ simplifié mais totalement compatible et une interface utilisateur ultra-simple).
On peut l’utiliser surtout pour du prototype rapide, mais de plus en plus comme solution définitive grâce à différentes formats, du plus pratique au plus compact.
Nous lui consacrons un grand nombre d’articles, à la fois de découverte et de prise en main pour les débutants, mais aussi des exemples d’utilisation dans des robots, des installations domotiques, des œuvres artistiques.
Articles
-
 Interruptions externes
Interruptions externes
23 novembre 2009, par Julien H. -
 Capteur "flex sensor" résistif
Capteur "flex sensor" résistif
13 janvier 2011, par Julien H.Un capteur de flexion : voilà une utilisation originale des propriétés mécaniques des matériaux conducteurs. Cette fois pour un usage purement robotique puisqu’il s’agit de contrôler des moteurs en fonction de la courbure du capteur.
Le matériel
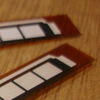
On utilise un capteur "Flex Sensor" de la société Spectra Symbol : deux fines couches de métal sont séparées par un polymère conducteur qui se déforme quand on le plie, modifiant la résistance aux bornes des deux couches métalliques.
Le capteur (…) -
 Contrôle avec un Wii Nunchuck
Contrôle avec un Wii Nunchuck
6 mai 2009, par Julien H.On s’intéresse ici à un dispositif de contrôle original. On va se faire plaisir en utilisant le Nunchuck, une manette de la console de jeu Nintendo Wii.
Il ne s’agit pas de la manette principale Wiimote (décrite dans cet article) mais d’un périphérique qui s’y connecte via un câble. En tant que tel, il est donc beaucoup plus simple, mais au vu de toutes les innovations dont il est doté, c’est déjà un bond en avant dans les dispositifs de télé-commande classique, qui se limitaient jusqu’ici (…) -
 Pilotage du Pobot Easy
Pilotage du Pobot Easy
2 mars 2009, par Julien H.On va pouvoir piloter le robot à distance avec les modules XBee. Une bonne occasion de faire un peu de télémétrie pour recevoir les différents événements qui se produisent à bord.
L’idée est d’installer sur ordinateur tout un tas de petites applets de visualisation : consignes de vitesse, vitesses des servomoteurs, positionnement par odométrie, vision par capteurs Sharp, etc...
Premier essai
On aura pour commencer : la production des consignes de vitesse, grâce à notre panneau de (…) -
 Arduino pilotée par Processing sur Raspberry Pi
Arduino pilotée par Processing sur Raspberry Pi
9 juillet 2012, par Julien H.Après avoir réussi à faire tourner quelques programmes sur la RPi, il était tant de l’utiliser pour contrôler un robot. C’est chose faite avec la première liaison Raspberry Pi / Arduino, utilisant Processing (Java) et Firmata (C++).
-
 Le Tankobot (2012)
Le Tankobot (2012)
19 mai 2012, par Julien H.Ce robot permet de faire des tests rapides d’algorithmes. Il a été conçu pour être très pratique et pouvoir servir à de nombreux ateliers. Il est donc robuste et simple.
Basé sur un châssis RP-5 offert par Zartronic, le Tankobot est un robot d’études mis au point grâce aux participants des ateliers hebdomadaires de l’association Pobot.
En 2013, il a été équipé d’une tourelle à 3 capteurs ultrasons. Mécanique
Les deux chenilles du robot sont mises en mouvement par deux moteurs à (…) -
 Transformer un capteur tout ou rien
Transformer un capteur tout ou rien
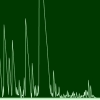
6 septembre 2008, par Julien H.Cet article présente un cas concret d’utilisation d’un capteur de présence (on/off) pour intégrer dans le temps ses valeurs et ainsi obtenir une valeur numérique plus intéressante.
Notre problématique est simple : on dispose d’un capteur de présence ou de proximité (PROXIR infrarouge dont on a déjà parlé ici) qui nous donne une indication très fugitive "je vois" / "je vois pas" et on voudrait en tirer un peu plus.
La solution est simple : on va mesurer le temps pendant lequel le capteur (…) -
 Ralentisseur de servomoteur
Ralentisseur de servomoteur
20 octobre 2013, par Jean-Pierre, Julien H.Cet article est une astuce pour contrôler la vitesse d’un servomoteur sans alourdir son programme principal. L’idée vient des modélistes qui utilisent des radio-commandes, et consiste à intercaler entre le signal et le servomoteur une petite puce qui fera l’intermédiaire.
-
Arduino pilotée en Python
16 août 2014, par Julien H.Cet article nous a été inspiré par Vincent L. (alias @InfluencePC) qui l’a mis en œuvre sur son robot avec une Raspberry Pi et la bibliothèque Nanpy. Bravo et merci à lui !
Lorsqu’il s’agit de faire fonctionner une carte Arduino avec un programme autonome sur ordinateur, il y a deux écoles : développer un programme spécifique sur Arduino qui gère la communication pour traiter chaque commande de l’ordinateur, ou bien installer un code générique qui gère la communication. Par "ordinateur", (…) -
 Odométrie du Pobot Easy
Odométrie du Pobot Easy
28 février 2009, par Julien H.Un capteur de lumière permet de détecter une alternance noir/blanc sur une roue et d’en déduire son avancée (position, vitesse).
