 PoBot
PoBot
 Electronique du robot 2008
Electronique du robot 2008Carte principale

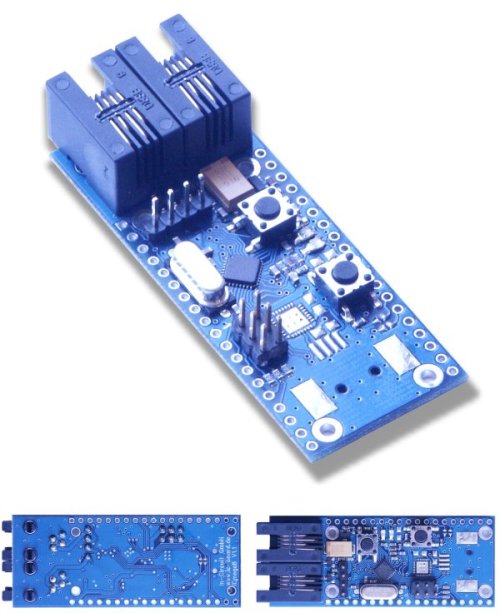
Elle est le cerveau du robot. Petite mais puissante : une carte de 8x8 cm contenant un Atmel AVR ATmega32 à 16 MHz (16 millions d’opérations à la seconde !). Elle gère l’intelligence artificielle, le pilotage des cartes filles (pour le déplacement), les capteurs et les actionneurs.
La carte comporte 4 ports HE10 pour une connexion facile, un buzzer pour entendre quand le robot bogue et une horloge RTC pour qu’il puisse nous prévenir qu’il est trop tard et qu’on devrait dormir 😉
Comme toujours, programmation "in situ" avec le connecteur ISP standard. Pour l’alimentation, nous avons glissé un convertisseur à découpage qui fait un 5V - sans chauffer à partir de n’importe quel alimentation de 5,5V à 16V !

Prix : 20 € y compris la puce !
Cartes filles
Deux ICmega8 (une pour les odomètres, l’autre pour les moteurs pas-à-pas) vont permettre de gérer le déplacement en communiquant en I2C avec la carte principale.
Prix : 20 € la carte
Ces cartes sont programmées par ISP [1] en utilisant un programmateur USB rapide et pratique (compatible avrdude)
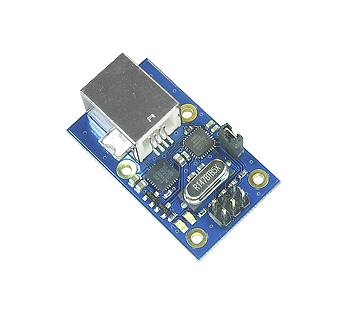
Prix : 28 € (utilisable sur toutes nos cartes)
Moteurs
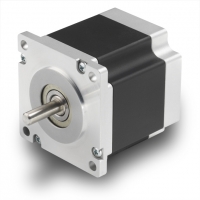
Nous utilisons deux moteurs pas-à-pas bipolaires biphase à 200 pas par tour. Ils sont à la norme NEMA23.
Ils ont un couple nominal annoncé de 0,9 N.m s’ils sont alimentés à 3A. Nous utiliserons une limitation de courant à 1A (largement suffisant pour un robot de 8kg), donc le couple (mesuré par des essais) ne sera que de 0,4 N.m : pour être certain de garder un couple maximal, nous utilisons une démultiplication et nous choisissons des roues plus grandes, ce qui nous permet de n’avoir une vitesse de rotation que de 170 rpm au lieu des 2400 rpm que peut faire le moteur, tout en gardant une vitesse maximale du robot de 80 cm/s !
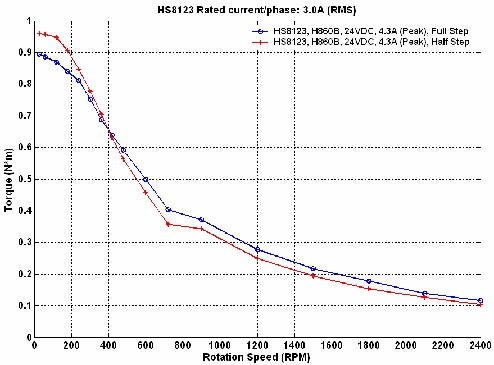
Ils sont pilotés par des drivers packagés permettant d’utiliser pas ou micro-pas (1/2, 1/4, 1/8) avec une limite de l’intensité en marche et à l’arrêt. Leur rôle est de convertir des signaux "simples" en provenance du programme (sens de rotation, 1 pulse par pas) en un enchainement de signaux directement sur les 4 poles des bobines du moteur. C’est cet enchainement qui détermine si le moteur va avancer d’un pas (bobine par bobine), par demi-pas (chevauchement des alimentations successives de bobines) ou par micro-pas (utilisation d’une intensité variable pour créer des positions intermédiaires "virtuelles" puisque ne correspondant pas à une attirance magnétique réelle des pôles)

Odomètres
Nous utilisons des encodeurs Scancon sur lesquels nous fixons une roue de petite dimension. Ces encodeurs sont déjà montés, isolés de la lumière et de la poussière, leur cable de fixation est blindé. Ils fournissent une information classique (2 signaux carrés en quadrature) de grande précision (2048 ticks par tour) et acceptant des grandes vitesses (200000 ticks par seconde) largement à la portée de nos µC à 8 MHz.
Pobot_Encodeur_3
envoyé par JulienPobot




