 PoBot
PoBot
Les moteurs électriques sont indispensables en robotique mobile, car c’est le moyen le plus simple pour faire avancer une mécanique (pas l’unique, on peut utiliser des élastiques, des muscles en alliage à mémoire de forme, ... mais la plus simple).
Mais on les connait souvent peu, car par manque de temps ou par économie et bien sûr par manque de connaissances, on choisit souvent le premier disponible ou le moins cher. Comme on peut trouver facilement des circuits électroniques tout (…)
Accueil > Mots-clés > Mécanique > moteur
moteur
Un moteur est un des composants électro-mécaniques essentiels pour un robot mobile, car 99% de ces machines en ont besoin pour se déplacer. Bien sûr il existe différents types de moteurs utilisés en robotique, et certains peuvent également servir à interagir avec l’environnement (pinces, bras).
Articles
-
 Les moteurs électriques expliqués
Les moteurs électriques expliqués
28 novembre 2009, par Henri C., Julien H. -
 Photos de la soucoupe
Photos de la soucoupe
2 octobre 2011, par Jean-Pierre, Julien H.Cette partie est autonome, et constitue le robot dans sa version nautique.
Elle est constituée d’une structure légère flottante, d’une électronique de contrôle à base de 2 micro-contrôleurs AVR et de relais pour la partie puissance.
Les huit capteurs forment une ceinture afin de couvrir toutes les directions de la même façon ; il n’y a donc pas à proprement parler d’avant et d’arrière.
Les moteurs permettent de changer de direction sur place et indépendamment de la vitesse. -
 Drikybot : contrôle des moteurs (2013)
Drikybot : contrôle des moteurs (2013)
22 mai 2013, par Audrick F.Contrôle de moteur du DrikyBot
-
 Ateliers de janvier 2013
Ateliers de janvier 2013
31 janvier 2013, par Julien H.Le mois de janvier a démarré traditionnellement par une galette des rois. La fève avait un goût de framboise...
En parallèle des préparatifs d’emménagement au CIV, nous avons continué les activités habituelles de nos réunions : apprentissage de la programmation de servomoteurs, de micro-contrôleurs.
Nous avons même réussi à réutiliser d’anciennes cartes en adaptant l’environnement de programmation (IDE) Arduino à un autre type de micro-contrôleur et de bootloader - le petit logiciel de (…) -
 Projet Barjallo : comment contrôler un moteur à courant continu ?
Projet Barjallo : comment contrôler un moteur à courant continu ?
16 mars 2014, par Frédéric R., Jean B.Cet article présente le projet "Barjallo" consacré aux ponts en H et au fonctionnement du transistor
-
 Mosfet pour moteur à courant continu
Mosfet pour moteur à courant continu
12 mai 2013, par Julien H.Les composants de puissance existent dans différentes familles, et les mosfets sont parmi les plus simples à utiliser pour couper un courant de grande intensité (plusieurs dizaines d’ampères).
Le contrôle de moteur peut parfois nécessiter une grande quantité de courant mais se satisfaire d’un simple contrôle de vitesse sans précision, sans asservissement en position. C’est le cas par exemple pour des hélices, ou pour des moteurs de propulsion puissants dont l’asservissement sera externe (…) -
 Contrôleur "pont en H" pour moteurs électriques
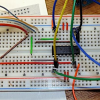
Contrôleur "pont en H" pour moteurs électriques
14 décembre 2009, par Julien H.Avec un seul circuit de type pont en H (L293 ou SN754410), on peut contrôler deux moteurs à courant continu ou un seul moteur pas à pas à deux phases. C’est ce que nous avons fait lors de nos ateliers hebdomadaires et que nous vous présentons ici.
Le but de cet article est de reproduire rapidement une expérience simple : faire tourner un moteur électrique à courant continu ou un moteur pas-à-pas (tels que ceux qu’on récupère dans des imprimantes) avec un composant simple et peu cher. Bien (…)
